用 Raspberry pi 寫驅動程式 -- 範例1:LED
寫驅動程式的時候,我們要先定義他的規格(specification):
- 透過3個gpio(General Purpose I/O)去控制3個LED,gpio的位置在載入模組(module)的時候(modprobe, insmod)可以額外設定而不需要重新編譯模組。
- 控制方法:寫入/dev/LED_n (n=0,1,2),若是寫入1則啟動LED,寫入0則關閉。
- 每個連入系統的使用者都可以控制
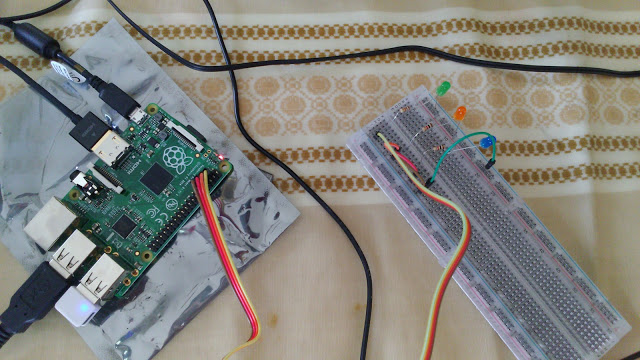
接起來就像這樣:
模組就先從最簡單的Hello World開始: hello.c
#include
#include
int hello_init(void)
{
printk("hello world!\n");
return 0;
}
void hello_exit(void)
{
printk("goodbye world!\n");
}
MODULE_LICENSE("GPL");
module_init(hello_init);
module_exit(hello_exit);
用以下的Makefile編譯:
obj-m += hello.o
EXTRA_CFLAGS += -I$(PWD)
all:
make -C /lib/modules/$(shell uname -r)/build M=$(PWD) modules
clean:
make -C /lib/modules/$(shell uname -r)/build M=$(PWD) clean
用insmod或modprobe載入後,module_init會呼叫hello_init函式,然後在dmesg(display message/driver message)顯示"hello
world!"。用rmmod卸載的話,module_exit會呼叫hello_exit函式,然後在dmesg(display message/driver message)顯示"goodbye world!"。
現在進入寫LED驅動程式的部份。 現在linux kernel已經有支援gpio控制的部份,記得加入標頭檔<linux/gpio.h>就好,這樣就不用像參考資料一樣還要查記憶體位址。(雖然現在kernel也有支援LED控制的部份,不過這個以後有空再說)
一個能控制gpio的模組,在載入(init)的時候大概要做這些事:
-
要求系統使用指定的gpio 使用gpio_request(還不知道要用input或output的時候)或gpio_request_one(只需要一個gpio的時候) 或gpio_request_array(要使用多個gpio時)
-
要求系統給予一個裝置號碼(device number)或自己提供一個裝置號碼要求系統登錄 使用alloc_chrdev_region(動態配置裝置號碼)或register_chrdev_region(自己提供裝置號碼)
-
分配(allocate)並初始(initial)一個字元裝置(character device)並加入系統 cdev_alloc, cdev_init(在此步驟要定義裝置使用者嘗試開啟關閉或讀寫裝置檔案時的動作), 與cdev_add
-
在/dev下新增裝置檔案(device file)以便讓使用者進行系統呼叫 class_create與device_create
卸載(exit)的時候,就把載入的步驟反過來做就好:
-
把在/dev下新增的裝置檔案移除 class_destroy
-
把加入系統的字元裝置移除 cdev_del
-
把登錄的裝置號碼取消 unregister_chrdev_region
-
取消指定使用的gpio gpio_free或gpio_free_array
以下是整個模組內需要用到的自訂變數跟巨集(macro)
#define LED_DRIVER_NAME "LED" // 驅動程式名稱
#define BUF_SIZE 5 // 用來讀取使用者寫入設備檔案的buffer
static dev_t driverno ; // 裝置編號
static struct cdev *gpio_cdev; // 字元裝置設備
static struct class *gpio_class; // 裝置群組
static struct gpio leds[] = { //3個欄位依序是gpio號碼、
{ 2, GPIOF_OUT_INIT_LOW, "LED_0" }, //輸入輸出模式(這裡GPIOF_OUT_INIT_LOW代表輸出但值為0)、
{ 3, GPIOF_OUT_INIT_LOW, "LED_1" }, //在/dev 內顯示的裝置名稱
{ 4, GPIOF_OUT_INIT_LOW, "LED_2" },
};
// 三個gpio的預設值
static int gpio0 = 2;
static int gpio1 = 3;
static int gpio2 = 4;
// gpio的值是可以在insmod的時候更改的
module_param(gpio0, int, S_IRUGO);
MODULE_PARM_DESC(gpio0, "GPIO-0 pin to use");
module_param(gpio1, int, S_IRUGO);
MODULE_PARM_DESC(gpio1, "GPIO-1 pin to use");
module_param(gpio2, int, S_IRUGO);
MODULE_PARM_DESC(gpio2, "GPIO-2 pin to use");
// Forward declarations
static ssize_t write_LED( struct file *, const char *,size_t,loff_t *);
//Operations that can be performed on the device
// struct file_operations 決定怎麼跟設備檔案溝通的方式
// 在規格中我們希望只透過"寫入"來開關LED,所以只需定義.write
static struct file_operations fops = {
.owner = THIS_MODULE, // 這是指定當前模組是這個結構的擁有者,這樣可以避免使用中的模組被卸載
.write = write_LED // 當使用者寫入檔案時,執行write_LED
};
write_LED長這樣:
// 這四個引數會被module使用,
// struct file *filp : 設備檔案
// const char *buf : 使用者輸入的字串
// size_t count : 使用者輸入字串數
// loff_t *f_pos : 使用者輸入的值要從第幾個字元開始算
static ssize_t write_LED( struct file *filp, const char *buf,size_t count,loff_t *f_pos){
char kbuf[BUF_SIZE];
unsigned int len=1, gpio;
// f_path 是路徑,dentry是entry的位置,d_inode是那個entry的設備號碼(有major和minor)
// 會這麼麻煩是因為我們有3個gpio
gpio = iminor(filp->f_path.dentry->d_inode);
printk(KERN_INFO LED_DRIVER_NAME " GPIO: LED_%d is modified. \n", gpio);
len = count < BUF_SIZE ? count-1 : BUF_SIZE-1;
// copy_from_user 是把使用者輸入的值(buf) copy "len"個字元到指定的buffer(kbuf)裡做後續處理
if(copy_from_user(kbuf, buf, len) != 0) return -EFAULT;
kbuf[len] = '\0';
printk(KERN_INFO LED_DRIVER_NAME " Request from user: %s\n", kbuf);
// 如果輸入1就打開,是0就關上
if (strcmp(kbuf, "1") == 0) {
printk(KERN_ALERT LED_DRIVER_NAME " LED_%d switch On \n", gpio);
gpio_set_value(leds[gpio].gpio, 1);
} else if (strcmp(kbuf, "0") == 0) {
printk(KERN_ALERT LED_DRIVER_NAME " LED_%d switch Off \n", gpio);
gpio_set_value(leds[gpio].gpio, 0);
}
// 這邊是停頓100 毫秒,注意"sleep"表示停頓期間cpu可以去做其他的事
// 如果用mdelay也是停頓100毫秒,可是cpu在停頓期必須待命不能做其他事,這會降低系統效能
msleep(100);
return count;
}
再來就是module_init的部份(code prettyprint不知道為何在這一直出問題,所以就不用了):
static int __init LED_init_module(void)
{
int ret, i;
// Set gpio according to the parameters you give
printk(KERN_INFO LED_DRIVER_NAME " %s\n", __func__);
modify_gpio(); // 把gpio_pin0(1,2)代入leds中的gpio setting
printk(KERN_INFO LED_DRIVER_NAME " gpio_request_array \n");
ret = gpio_request_array(leds, ARRAY_SIZE(leds)); // 向系統要求gpio
if (ret < 0) {
printk(KERN_ERR LED_DRIVER_NAME " Unable to request GPIOs: %d\n", ret);
goto exit_gpio_request;
}
// Get driver number 向系統調用driver number
printk(KERN_INFO LED_DRIVER_NAME " alloc_chrdev_region \n");
ret = alloc_chrdev_region(&driverno, 0, ARRAY_SIZE(leds), LED_DRIVER_NAME);
if (ret) {
printk(KERN_EMERG LED_DRIVER_NAME " alloc_chrdev_region failed\n");
goto exit_gpio_request;
}
printk(KERN_INFO LED_DRIVER_NAME " DRIVER No. of %s is %d\n", LED_DRIVER_NAME,
MAJOR(driverno));
printk(KERN_INFO LED_DRIVER_NAME " cdev_alloc\n");
// 配備cdev
gpio_cdev = cdev_alloc();
if (gpio_cdev == NULL) {
printk(KERN_EMERG LED_DRIVER_NAME " Cannot alloc cdev\n");
ret = -ENOMEM;
goto exit_unregister_chrdev;
}
printk(KERN_INFO LED_DRIVER_NAME " cdev_init\n");
// 初始cdev並跟 file_operations連結
cdev_init(gpio_cdev, &fops);
gpio_cdev->owner = THIS_MODULE;
printk(KERN_INFO LED_DRIVER_NAME " cdev_add\n");
// 新增cdev並跟獲得的配備編號連結(leds有三個元件)
ret = cdev_add(gpio_cdev, driverno, ARRAY_SIZE(leds));
if (ret) {
printk(KERN_EMERG LED_DRIVER_NAME " cdev_add failed!\n");
goto exit_cdev;
}
printk(KERN_INFO LED_DRIVER_NAME " Play blink\n");
blink(); // 自己寫的小程式,確定gpio有起來
printk(KERN_INFO LED_DRIVER_NAME " Create class \n");
// 在/sys/class 內新增class
gpio_class = class_create(THIS_MODULE, LED_DRIVER_NAME);
if (IS_ERR(gpio_class)) {
printk(KERN_ERR LED_DRIVER_NAME " class_create failed\n");
ret = PTR_ERR(gpio_class);
goto exit_cdev;
}
// 新增node到 /dev/ 跟/sys/class/LED_DRIVER_NAME 下
printk(KERN_INFO LED_DRIVER_NAME " Create device \n");
for (i = 0; i < ARRAY_SIZE(leds); ++i) {
if (device_create(gpio_class, NULL, MKDEV(MAJOR(driverno), MINOR(driverno) + i),
NULL, leds[i].label) == NULL) {
printk(KERN_ERR LED_DRIVER_NAME " device_create failed\n");
ret = -1;
goto exit_cdev;
}
}
return 0;
exit_cdev:
cdev_del(gpio_cdev);
exit_unregister_chrdev:
unregister_chrdev_region(driverno, ARRAY_SIZE(leds));
exit_gpio_request:
gpio_free_array(leds, ARRAY_SIZE(leds));
return ret;
}
module_exit就是把module_init初始的東西都取消就好
static void __exit LED_exit_module(void)
{
int i;
printk(KERN_INFO LED_DRIVER_NAME " %s\n", __func__);
// turn all off
for (i = 0; i < ARRAY_SIZE(leds); i++) {
gpio_set_value(leds[i].gpio, 0);
device_destroy(gpio_class, MKDEV(MAJOR(driverno),
MINOR(driverno) + i)); // 把node移掉
}
class_destroy(gpio_class); // 取消class
cdev_del(gpio_cdev); // 移除cdev
unregister_chrdev_region(driverno, ARRAY_SIZE(leds)); // 解登錄driverno
gpio_free_array(leds, ARRAY_SIZE(leds)); // 釋放gpio
}
完整的程式碼在此(包含測試檔案) https://gist.github.com/gnitnaw/b116f358fa688897fe00
insmod完,/dev/下就會出現節點
pi@raspberrypi ~/work/driver/LED3 $ ls -l /dev/LED*
crw------- 1 root root 246, 0 juin 23 12:47 /dev/LED_0
crw------- 1 root root 246, 1 juin 23 12:47 /dev/LED_1
crw------- 1 root root 246, 2 juin 23 12:47 /dev/LED_2
權限這時還沒開,需要使用sudo 把/dev/LED_0(1,2)權限改成666
pi@raspberrypi ~/work/driver/LED3 $ ls -l /dev/LED*
crw-rw-rw- 1 root root 246, 0 juin 23 12:41 /dev/LED_0
crw-rw-rw- 1 root root 246, 1 juin 23 12:41 /dev/LED_1
這樣就能開始使用了。
##參考資料:
臺灣樹莓派 -- 用Raspberry Pi學Linux驅動程式
http://fr.slideshare.net/raspberrypi-tw/write-adevicedriveronraspberrypihowto https://github.com/wendlers/rpi-kmod-samples