buildRoot study - 建立自己的作業系統
[轉] http://fichugh.blogspot.tw/2016/02/buildroot-study.html
##Introduction 因為想要了解整個Linux作業系統,從開機到系統穩定的中間流程,到底經歷過哪幾個步驟, 所以想要自己兜「boot-loader」,「kernel」和「root file system」, 研究過程中發現了,原來早已經有組織在從事類似的專案,像是「Buildroot」,「Yocto/OpenEmbedded」 所以我就想來研究一下Buildroot的架構。
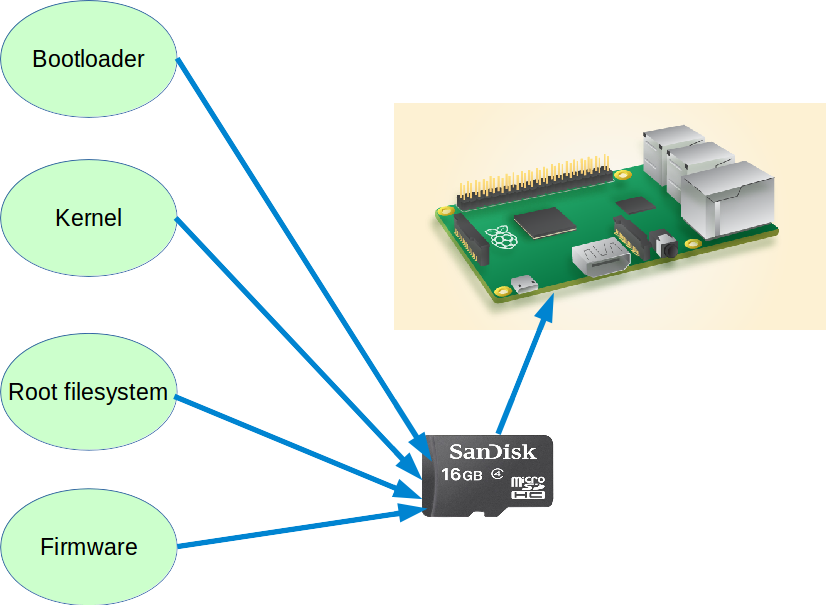
這篇文章的成果會從Buildroot專案中build出「bootloader」, 「kernel」和「root fileSystem」, 然後我們會在將這幾個元件和官方的firmware放到raspberry pi 2裡面開機後來研究整個開機流程。
Buildroot
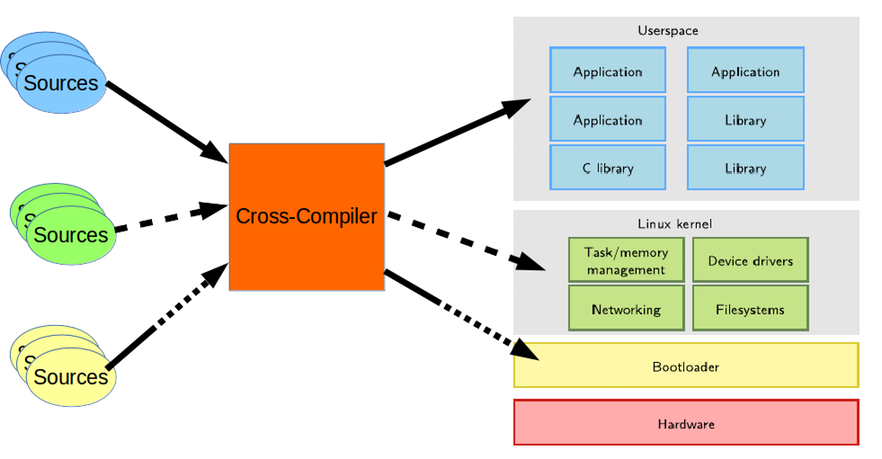
以一個專案標語:Making Embedded Linux Easy啟動的這個專案, 基本的概念就是先建立一個自用的cross-compilation toolchain, 然後經由這個這個cross-compiler去編譯kernel和建立root file system。
主要的設計理念是:
- Simple to use
- Simple to customize
- Reproducible builds
- Small root filesystem
- Relatively fast boot
- Easy to understand
那有誰在用呢?
-
System makers
- Barco
- Rockwell Collins
-
Processor vendors
- Imagination Technologies
- Marvell
- Atmel
- Analog Devices
當然除了以上大公司,還有很多其他公司和業餘愛好者都會用它來開發版子。
##Simplified Linux system architecture 一個簡單的Linux系統架構,如下圖,主要分為4個部份:
1. Hardware
2. Boot loader
3. Linux Kernel
4. User space (Applications)
除了Hardware以外,Buildroot專案建制過程中其他的3個部份都會自己建置。 所以建制完後,我們主要會有「ToolChain」, 「bootloader image」, 「kernel image」和「root fileSystem image」。
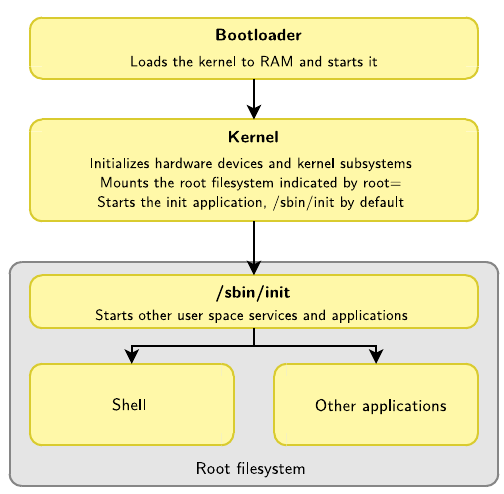
假設我們的專案現在已經建制好了,也已經放到儲存裝置(Flash or EMMC ....),電源插上去後, 第 1 個跑的程式就是BootLoader,他會啟動一些基本的驅動程式,以供開機中使用,最終就是將kerner載入到記憶體裡,接下來就是將控制權轉交給Kernel。
第2個就是Kernel會初始化硬體裝置和我們的檔案系統,然後執行第一個程式/sbin/init。
第3步init就會啟動剩下來user space的service和application。
第4步我們通常就會看到login shell展示再我們面前了,在後面章節會有更詳細的介紹。
Preparation
Ubuntu 這邊使用的Host OS是Ubuntu。
數莓派[廢話]

TTL Cable [天瓏書局有在賣]

##Docker
使用一個完全乾淨的Container來做這件事, 事情會比較單純化,也會加深很多印象。
詳細Docker內容請參考網站。
##開啟Docker
sudo docker run -t -i -v ~/mnt/mnt_docker:/tmp/package ubuntu bash
~/mnt/mnt_docker : /tmp/package語法是host 和container的資料共享 => host folder : Container folder 接下來所有內容都是在Docker裡面執行的。
下載套件
sudo apt-get update
sudo apt-get install g++ make gawk -y
sudo apt-get install git-core libncurses5-dev vim -y
sudo apt-get install wget python unzip bc -y
Build buildRoot
最簡單的建置法
git clone git://git.busybox.net/buildroot
cd buildroot/
make raspberrypi2_defconfig
make 2>&1 | tee build.log
結束~~
但是我要故意把他複雜化,這樣才可以理解他裡面的運作原理!
請接下面的Build Step by Step開始。
Build Step by Step
get sources by git
cd /tmp/
git clone git://git.busybox.net/buildroot
cd buildroot/
get build information buildroot裡面有很多內建的組態,

裡面有raspberrypi2! 在來看一下怎麼弄,很簡單
vim /board/raspberrypi2/readme.txt
官方github上的文件--> 請點我
##Download all Sources buildroot的所有package, sources都是build之前才會從網路上下載下來,所以第一次build會很久, 因為包含下載,所以這邊我們先來研究一下,他下載了多少東西,請下指令:
make help
發現裡面有個指令是
source - download all sources needed for offline-build
下載所有資源之前要先建立組態
make list-defconfigs
上面這個指令會顯示目前有支援多少預設的組態, 我們發現有數莓派2的,所以下以下指令:
make raspberrypi2_defconfig
然後只要下這個指令就會下載所有個資源:
make source
套件說明: 總共下載了21個套件,下載完的套件都放在資料夾「dl」裡面, 底下就來介紹一下每個套件大概的用途:
- xz-5.2.2: 包含對檔案的壓縮和解壓縮,裡面提供了「lzma」和新的「xz」壓縮的格式。
- gcc-4.9 - 略
- binutils-2.24 - 略
- gmp-6.1.0 - 略
- mpc-1.0.3 - 略
- mpfr-3.1.3 - 略
- linux-header - 略 以上6個套件都是用來建立Corss-Compiler的,請參考我之前發過的主題「How to Build a GCC Cross-Compiler」裡面的套件說明有解釋。
- m4-1.4.17: 裡麵包含了巨集處理器(macro processor)。
- uClibc-ng-1.0.12 是一種C的library,一般來說都是用Glibc,但是這邊選用uClibc,因為他比較小,也支援沒有MMU的架構,非常適合比較小的系統(< 10 MB)。
- kmod-22: 包含了讀取kernel module的函式庫和程式。
- pkgconf-0.9.12: 在設定組態或者在make 專案時,這個套件會傳遞一些include和library的路徑給建置的軟體。
- busybox-1.24.1 Busybox在單一的可執行文件中提供了精簡的Unix工作集,可運行於多款POSIX環境得的操作系統。
- dosfstools-3.0.28 可以讓使用者在GNU/Linux OS上很快速的建立,設立標籤和檢查MS-DOS FAT 的檔案格式(mkfs.fat, fsck.fat and fatlabel)。
- e2fsprogs-1.42.13: 裡面有處理ext2 檔案系統的程式。當然他也支援ext3和ext4。
- genext2fs-1.4.1 這個程式可以讓你建立ext2的檔案系統。
- genimage-8 可從一個root filesystem裡面建立多種檔案系統和flash image。
- confuse-2.8: libcoufuse提供了一些組態分析函式庫。
- flex-2.5.37: 裡面的套件可以產生可辨識文字pattern的程式(反正就是正規表示法那些東西)。
- mtools-4.0.18: 是一套允許讓Unix系統去操控MS-DOS格式上的檔案操作,像是讀寫檔,和搬運檔案等等。
- rpi-firmware: 數莓派官方release出來的軔體,這部份待回會在說明。
- fakeroot_1.20.2.orig 可用來模擬root的權限去做一些操作。
修改組態 如果想要自己修改設定,就跟修改kernel 組態一樣, 這邊我們來修改一下兩個設定,請輸入
make menuconfig
然後將選項 Filesystem images ---> tar the root filesystem--->Compression method選擇是bzip2,如下圖:

這樣我們待回的root filesytem就會以tar ball 的型式。 然後我們也想要自己build個u-boot來玩玩。 所以選項 Bootloaders --> 選擇U-boot選項,Board defconfig 輸入「rpi_2」。 上面那個指令會產生一個.conifg檔案,這邊來研究一下他開啟了哪些功能-->請按我

##開始建制 剛剛組態已經產生,sources也已經下載好了,接下來我們就開始建制。
make 2>&1 | tee build.log
所有的package都會解壓縮在output/build,並且建置。 所有的結果都會在output/images裡面。
在output/images裡面, sdcard.img算是整個結果的image, 假設你的sdcard是 /dev/sdd, 你只要下指令:
sudo dd if=sdcard.img of=/dev/sdd
然後在把sdcard卡插進去pi2裡面,就可以開機了, 但是像我說的,我要故意把他複雜化,這樣才可以理解裡面的運作原理。
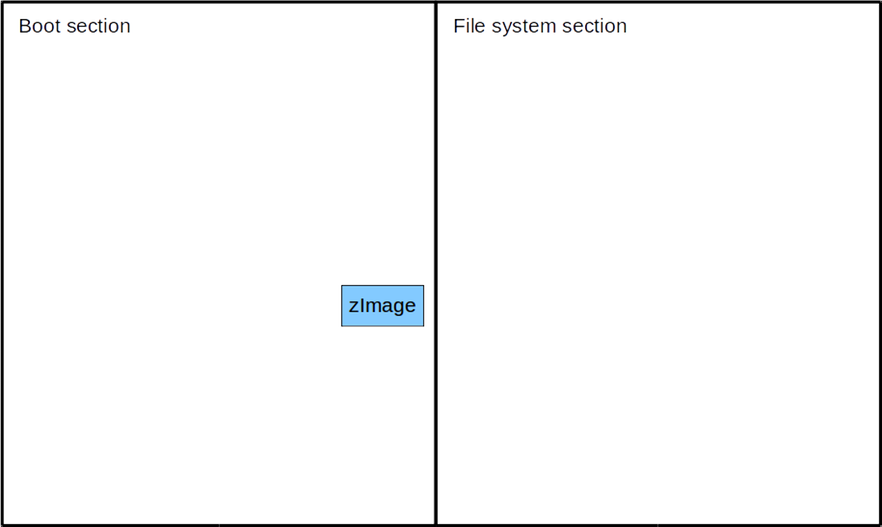
在output/images裡面, 我們待回會用到的是:
1. kernel --> zImage
2. root file system --> rootfs.tar.bz2
3. device tree blob --> bcm2709-rpi-2-b.dtb
4. raspberry firmware --> rpi-firmware/*
5. boot loader --> u-boot.bin
所以底下會有另外5相對應的標題, 教怎麼把以上5個部份裝起來,並且開機。
Partition SD Card
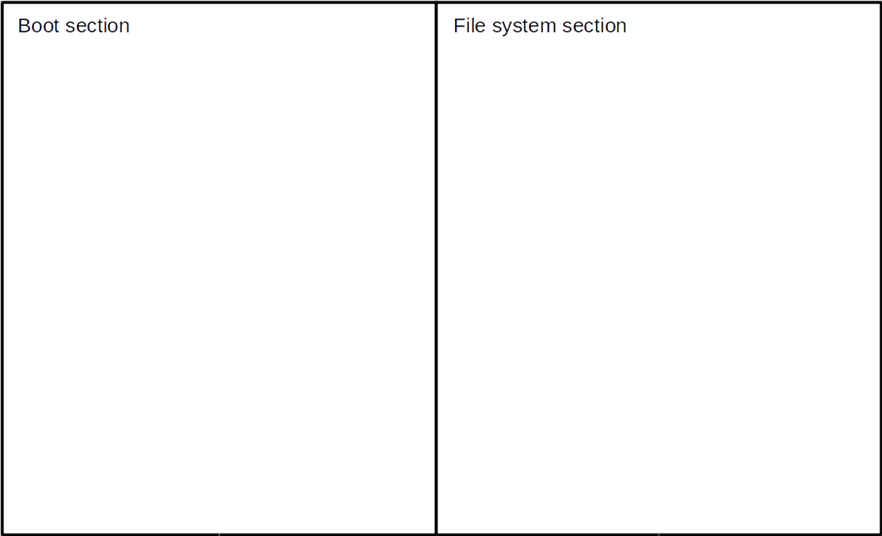
首先我們必須有一塊Micro SD,我們要將它分成兩個partition,其中第一個為boot section,另一個partition是放我們的rootfs的地方。
###1. 假設路徑是/dev/sdd,先進入fdisk系統
$ sudo fdisk /dev/sdd
###2. 將預設單位改成cylinders
Command (m for help): u
###3. 建立一個新的DOS格式的partition table:
Command (m for help): o
###4. 建立放boot loader的partition (以下兩步的重點是規劃200MB的boot partition,其他的都規檔案系統用)
Command (m for help): n
Partition type:
p primary (0 primary, 0 extended, 4 free)
e extended
Select (default p): p (The new partition is a primary partition.)
Partition number (1-4, default 1): (Press Enter for default.)
Using default value 1
First cylinder (2-15193, default 2): 2
Last cylinder, +cylinders or +size{K,M,G} (2-15193, default 15193): +200M
###5. 建立放檔案系統的partition
Command (m for help): n
Partition type:
p primary (1 primary, 0 extended, 3 free)
e extended
Select (default p): p (The new partition is a primary partition.)
Partition number (2-4, default 2): (Press Enter for default.)
Using default value 2
First cylinder (2048-15193, default 2): 2048
Last cylinder, +cylinders or +size{K,M,G} (2-15193, default 15193): 15193
###6. 將第一個磁區標注為bootable
Command (m for help): a
Partition number (1-4): 1 (Select Partition 1 to be active.)
###7. 將第一個磁區改為FAT32
Command (m for help): t
Selected partition 1
Hex code (type L to list codes): c
Changed system type of partition 1 to c (W95 FAT32 (LBA))
###8.寫入新的partition table
Command (m for help): w
###9. 格式化新的boot load磁區為DOS FAT32 檔案系統
$sudo mkfs.vfat -F32 /dev/sdd1
mkfs.vfat 3.0.13 (30 Jun 2012)
###10.格式化第二個磁區為ext4檔案系統
$sudo mkfs.ext4 /dev/sdd2
###11. 掛載裝置
mkdir -p ~/mnt/fat32
mkdir -p ~/mnt/rtfs
sudo mount /dev/sdd1 ~/mnt/fat32
sudo mount /dev/sdd2 ~/mnt/rtfs
所以我們得到了兩個Partitions,概念如下:
###1. Kernel Image 我們將kernel的Image複製到boot section
sudo cp output/images/zImage ~/mnt/fat32
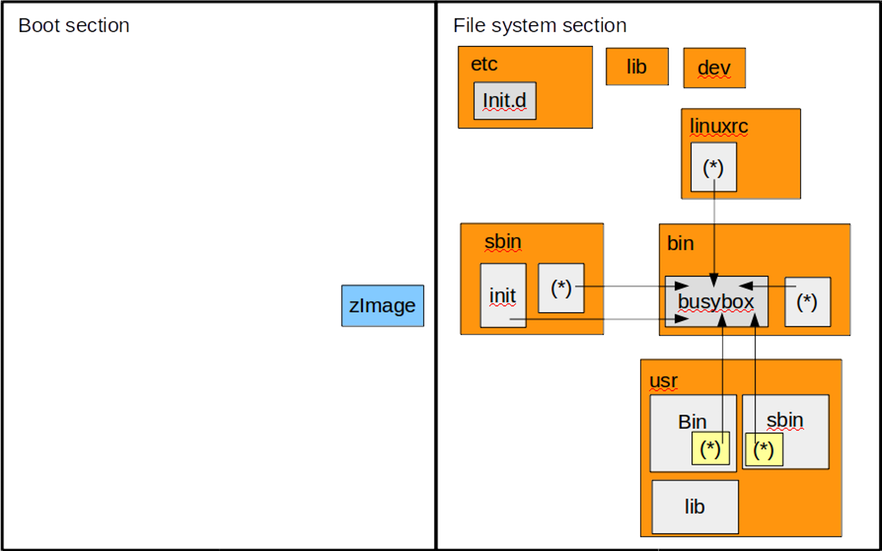
2. root file system
將root file system的image複製到第二個partition底下然後再解壓縮。
sudo cp outpupt/images/rootfs.tar.bz2 ~/mnt/rtfs
cd ~/mnt/rtfs
sudo tar -jvxf rootfs.tar.bz2
sudo rm rootfs.tar.bz2
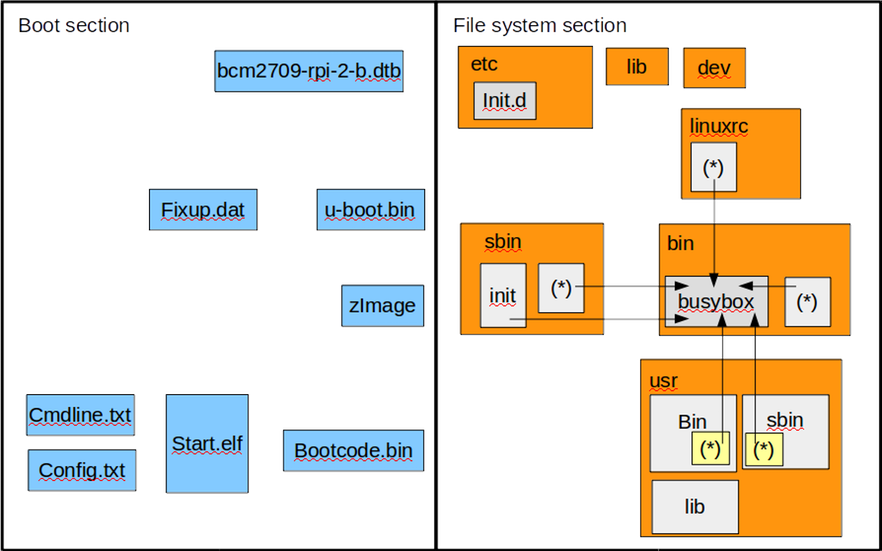
所以我們的極小型root filesystem已經到位了。
這一個file system裡面所有的東西,基本上都是busybox去兜出來的。
由下圖可以看到,幾乎所有的檔案都是連結到/bin/busybox的。
而/dev這資料夾的檔案都是kernel devtmpfs所建立出來的。
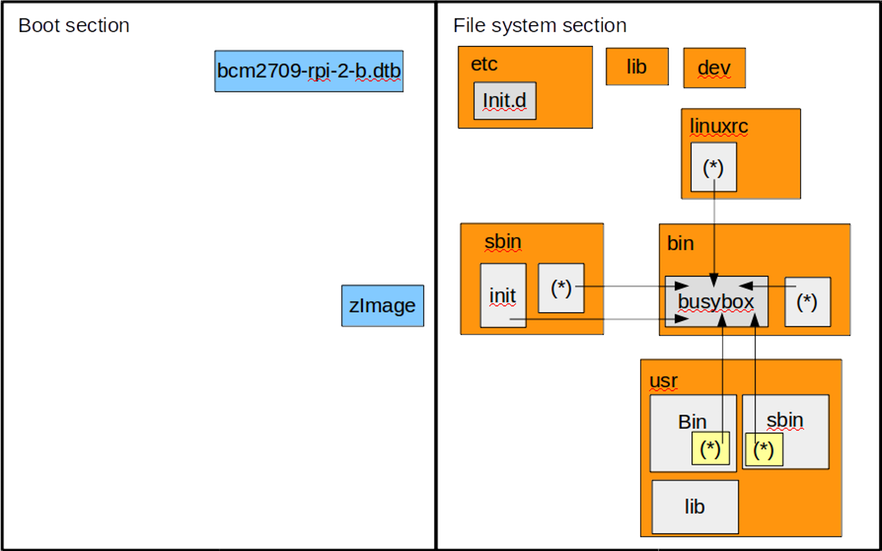
###3. device tree blob 將裝置樹檔複製到boot section。
sudo cp output/images/bcm2709-rpi-2-b.dtb ~/mnt/fat32/
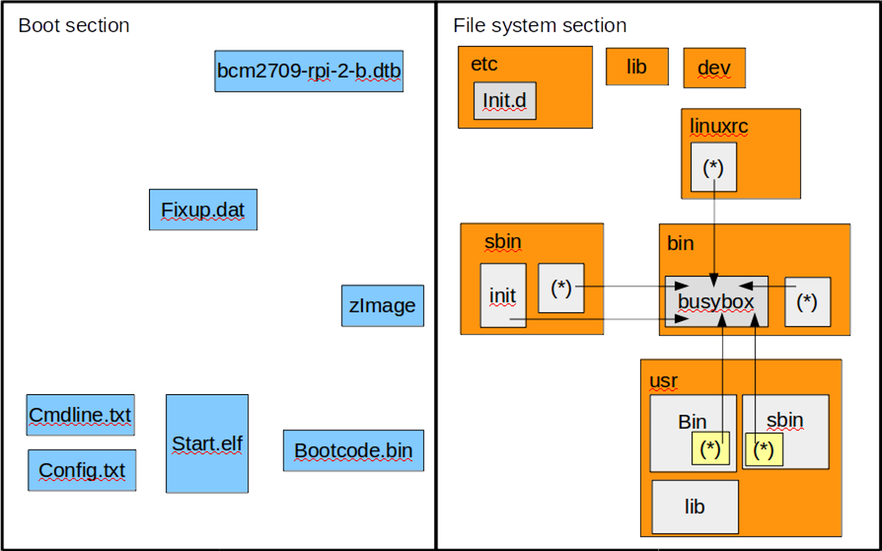
4. raspberry pi official firmware
些軔體並不是這個專案build出來的,是從官方那邊下載下來的。 其實有兩種方式取得:
- https://github.com/raspberrypi/firmware/tree/master/boot
- https://www.raspberrypi.org/downloads/raspbian/
第二個為Ra pi 2的image file, 如果想要把相對應的檔案取出來,請看底下3步驟 阿不想知道的,請忽略底下3步驟:
- 下載image File
- 這個image有兩個partitions,所以無法直接掛載,需要先找到boot partition的開始section

由上可知道,第一個磁區是從8192開始,所以總共要偏移8192*512 = 4194304 bytes
###3. mount 第一個磁區.
$ sudo mount -o loop,offset=4194304 2015-05-05-raspbian-wheezy.img ~/mnt
在firmware裡,我們需要的檔案有
start.elf (GPU frimware)
bootcode.bin ( bootloaders)
config.txt (裡面也是有一些組態)
cmdline.txt (這個檔案裡面的文字都會當作參數傳遞給Kernel)
fixup.dat (用來組態GPU和CPU之間的SDRAM partition)
反正就是把rpi-firmware資料夾底下的東西都複製到boot section就對了
###5. U-boot 將u-boot.bin複製到boot section,
sudo cp output/images/u-boot.bin ~/mnt/fat32
然後修改config.txt, kernel=zImage 改成 kernel=u-boot.bin
這樣在final-stage bootloader時,就會去讀我們的u-boot.bin而不是直接進入kernel。
##開機和驗收
###1. 接上TTL Cable ###2. 開啟終端機
sudo screen /dev/ttyUSB0 115200
ttyUSB0是我這邊的Port,每個人的不一定一樣,所以請根據自己的case修改(然後要記得裝driver), bound rate我這邊是115200,因為這是rapi2的預設,如有其他case也請自行修改。
###3. 接上電源 在rapi2上的HDMI接著螢幕的狀況下,接上電源 如果成功的話,你就會發現終端機上開始有log了, 記得在Hit any key to stop autoboot時,隨便敲個字, 然後就會進入U-boot的命令列了,如下:

###4. 手動u-boot開機
我們第一次可以先手動開機,藉由一個指令一個指令去了解做了什麼事。
# Tell Linux that it is booting on a Raspberry Pi2
setenv machid 0x00000c42
# Set the kernel boot command line
setenv bootargs "earlyprintk console=tty0 console=ttyAMA0 root=/dev/mmcblk0p2 rootfstype=ext4 rootwait noinitrd"
# Save these changes to u-boot's environment
saveenv
# Load the existing Linux kernel into RAM
fatload mmc 0:1 ${kernel_addr_r} zImage
# Boot the kernel we have just loaded
bootz ${kernel_addr_r}
- 如果不是在開發kernel或測試,又或者沒有遇到一些早期loader的問題的話,可以把earlyprintk這個選項省略,就不會一堆log了。
- 我們要使用serial console所以這個選項要留著。
- /dev/mmcblk0p2這個路徑是Raspbian的,如果路徑不一樣的話,這邊要記得改成存放rootfs的路徑。
- 如果rootfs的格式不是EXT4的話,這邊要記得˙改。
當這一行bootz ${kernel_addr_r}執行下去後,如果沒問題的話,就會看到一堆log了,代表已經順利開機,u-boot已經順利將控制權交給kernel了。
但是跑到「random: nonblocking pool is initialized」這一行時,你會發現, 怪了,怎麼不會動了??而且HDMI上也沒有畫面。
##5. 改回kernel開機 這時關機以後,我們在嘗試著修改config.txt
把kernel=u-boot.bin
再改回
kernel=zImage
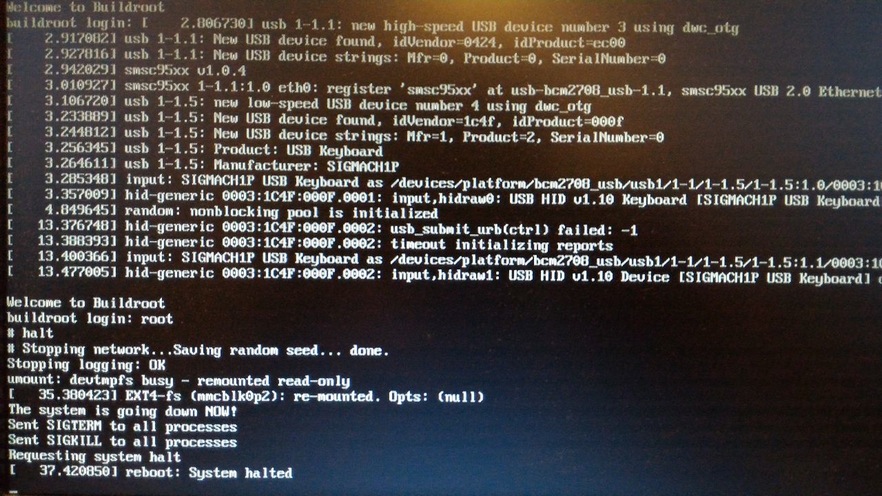
在TTL cable還接著的狀態下,再次開機, 我們發現,HDMI下的螢幕,開機正常, 但是終端機還是卡在相同的一行, 所以我們對著pi2上的鍵盤輸入登入帳號:root 然後嘗試著關機輸入:halt 顯示圖如下:
6. 再次手動u-boot開機
再次修改config.txt, 把kernel=zImage 再改回 kernel=u-boot.bin
然後跟剛剛一樣的步驟,發現還是停在「random: nonblocking pool is initialized」, 這時候我們一樣對著接著rapi2的鍵盤(不是終端機)輸入:root 按Enter 然後再輸入:halt 按Enter 發現有log了,也正常關機了。 如下圖:

##7. 檢查inittab
正常開機後,檢查一下/etc/inittab, 發現在開機階段,只有宣告tty1的getty:
# Put a getty on the serial port
tty1::respawn:/sbin/getty -L tty1 0 vt100 # GENERIC_SERIAL
數莓派的UART driver是AMA, 所以我們自己在加入ttyAMA0的getty :
# Spawn a getty on Raspberry Pi serial line
ttyAMA0::respawn:/sbin/getty -L ttyAMA0 115200 vt100
然後reboot以後到log停住的地方,按一下Enter就會出現login shell了。

How the Raspberry Pi boots up
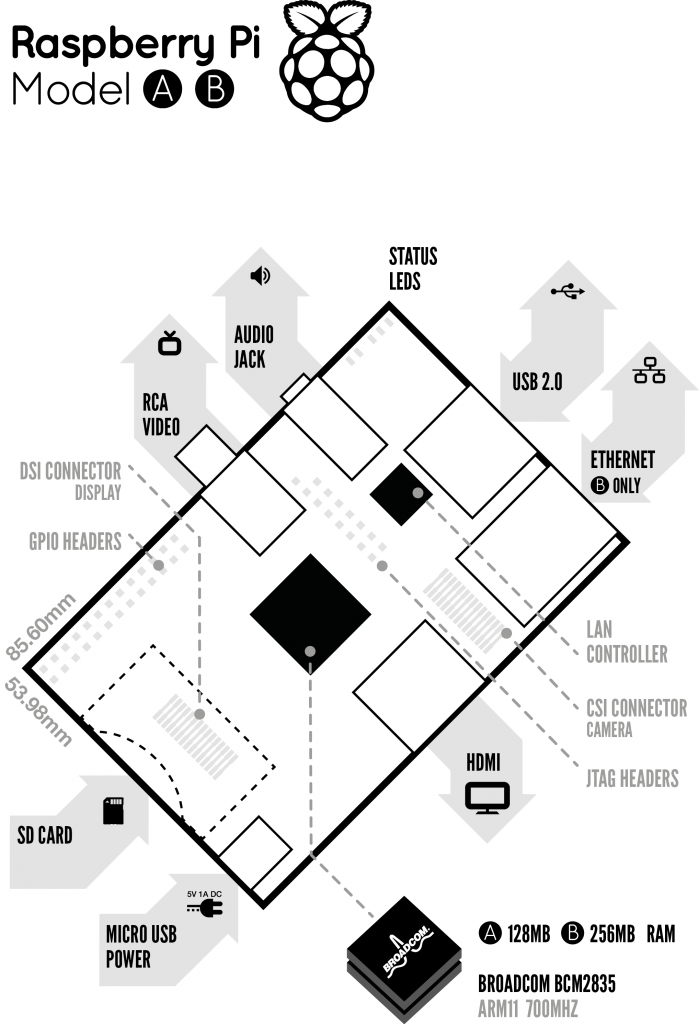
如上圖,pi 2 的SOC是採用Broadcom BCM2835,它包含了 ARM11的CPU,VideoCore GPU, ROM chips, SDRAM和其他的東西。
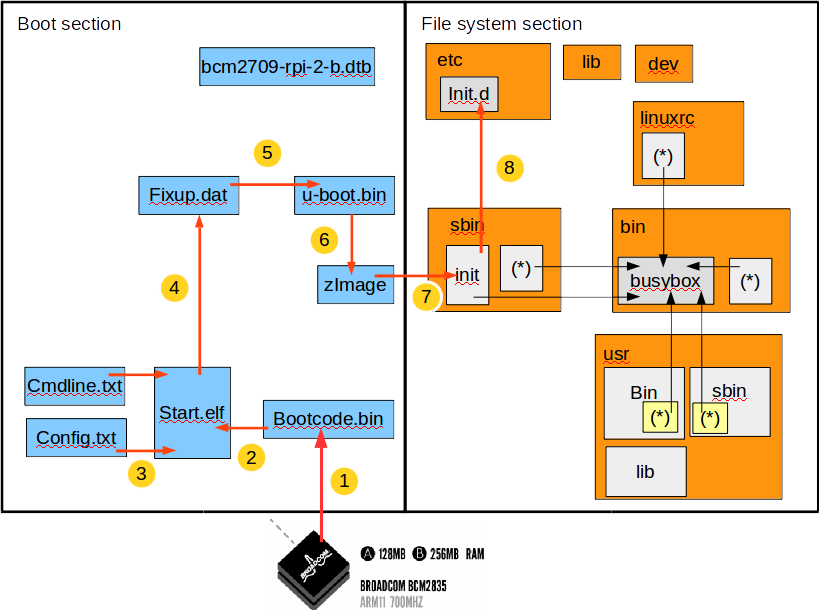
底下是搭配剛剛我們兜出來的元件概念圖,來解釋數莓派上簡單的Linux開機流程:
-
當pi 2 通電以後,其實第一個啟動的指令,是在SOC的ROM上,好吧,所以代表這邊已經是黑箱了,無法繼續追下去=.=,所以這個黑箱裡所做的是是所謂的first-stage bootloader。在first-stage時,他會mount上我們的SD card裡的FAT32的 boot partition,接下來我們SD Card裡面的bootcode.bin 就是second-stage bootloader。根據文獻,在first-stage時,CPU跟RAM都還沒被初始化(意思是CPU還是在reset的狀態)。所以到目前為止,都是再GPU裡面運行,而不是CPU。
-
接下來bootloader.bin就會被讀到GPU上的L2 cache上並且被執行。在這步驟就會啟動RAM,並且讀取start.elf檔。
-
讀取start.elf以後,就是third-stage bootloader了,這個檔案是GPU的軔體,他會去讀取再config.txt裡面得的設定(根據網路文獻,就是把config.txt當成BIOS setting就對了XD)。裡面有些參數是我們可以調整的,都是是些frequency,有需要可以參考[h]。在start.elf階段,GPU和CPU所使用的RAM還是在不同的區段(ex. 如果GPU使用0X0000F000~0X0000FFFF的話,CPU就會使用0X00000000~0X0000EFFF)。
-
接下來,如果有cmdline.txt的話,在start.elf裡面也會被讀取,這個檔案包含了一些cmd的參數,然後跑fixup.dat,組態GPU和CPU之間的SDRAM partition,在這個階段CPU就會reset,也代表交接結束了。
-
到這個階段已經是final-stage bootloader了,接下來start.elf會讀取u-boot.bin。
-
然後我們再自己手動把kernel 也就是zImage給讀進記憶體裡面,並且將控制權交給kernel,然後作業系統就啟動了。 當作業系統啟動後,其實GPU還在運行,因為start.elf並不只是GPU的軔體,他也是一個"proprietary OS (私權OS)"叫作VideoCore OS,有時候正常的OS需要一些參數時,也會經由˙mailbox messaging system去要求VCOS傳給他。
-
當Kernel將大部分的硬體裝置和我們的檔案系統初始化後,就會執行第一個程式/sbin/init。
-
然後會在去啟動剩下來user space的service和application。在來就是login shell
結論
-
正常的狀況下,buildroot並沒有提供GPIO的login shell。(因為是使用busybox,所以當kernel將控制權交給busy的init時,就沒有log了,這地方要再研究一下)
(solved --> 要修改inittab) -
如果是用u-boot去開機的話,螢幕的驅動程式都不會作用。但是鍵盤是可以的。(所以照裡來說,u-boot裡面應該要有驅動才對,這地方也要再研究一下)
:另一處「如果是用u-boot去開機的話,螢幕的驅動程式都不會作用」,應該明確說 HDMI output 是否運作,要注意到 RPi 的設定,這點在官方網頁就有說明瞭 -
所以整個專案下來,我們已經瞭解了數莓派上Linux的開機流程,接下來,我要嘗試著不要依賴buildroot套件,而是每個元件都自己建立會更加的瞭解Linux的構成。
Jserv:「接下來,我要嘗試著不要依賴buildroot套件,而是每個元件都自己建立會更加的瞭解Linux的構成」這個目標也不壞,但為何不先試著修改 buildroot 呢?嘗試新增或移除特定的套件呢? 如果現在是 2000 年,我會鼓勵學生用「不透過 buildroot 一類的工具,徒手建立 root filesystem」,但我現在不會建議這樣作,原因是:(1) 你得跟得上時代,和技術社群用相似的開發工具、開發流程,知道如何和其他開發者交流; (2) 這幾年系統變異很大,諸如用 systemd 取代 init、Yocto/OpenEmbedded 技術社群的快速成長,幾乎只能透過閱讀 git log,才能窺知技術發展的動向。倘若你今天還是「閉門造車」,恐怕只是遠離這個世界 -
Jserv:至於修改 buildroot,你可以參考這個專案:https://github.com/mpolakovic/qemrdux-player # 透過 buildroot,從無到有打造一個 MP3 Player 的韌體
ref:
- a. https://docs.google.com/viewerng/viewer?url=http://free-electrons.com/doc/training/buildroot/buildroot-slides.pdf
- b. http://free-electrons.com/
- c. https://buildroot.org/downloads/manual/manual.pdf
- d. http://cellux.github.io/articles/diy-linux-with-buildroot-part-1/
- e. how-the-raspberry-pi-boots-up
- f. Booting a Raspberry Pi2, with u-boot and HYP enabled
- g. Embedded Linux 嵌入式系統開發實務
- h. RPi Serial Connection
- i. Preparing a bootable SD card